機械工学科及び機械情報システム工学専攻の学生チームがコンビニ店舗の作業自動化を競うロボットコンテストで入賞しました
本校の機械工学科および機械情報システム工学専攻の学生8名によるチームが、コンビニエンスストア店舗における各種業務の自動化を対象としたロボット技術コンテスト「Future Convenience Store Contest 2023(*1)」(7月13~14日@パシフィコ横浜)に出場し、「陳列・廃棄タスク」部門で3位入賞を果たしました。

本競技会に出場したのは、東京高専 本科機械工学科5年生の門田有紀さん、羽鳥倫太朗さん、松尾大祐さん、フィルマンさん、および専攻科機械情報システム工学専攻の榑林紹さん、野島綸太さん、柵木貴人さん、宮原琉さんの8名の学生チームです(指導教員は機械工学科の原口大輔准教授)。本校の特色である「社会実装プロジェクト」の授業にて本科生が約9か月間、専攻科生の技術サポートを受けながらロボット開発に取り組んだ成果を披露しました。競技会では、並居る大学院生や企業エンジニアらのチームの中でも引けをとらない技術力を発揮し、初出場で3位入賞と大健闘しました。

上段: 左から榑林さん、柵木さん、羽鳥さん、フィルマンさん
下段: 左から原口准教授、宮原さん、松尾さん、野島さん、門田さん
ロボットシステムの概要
コンビニ店舗内でロボットが商品の陳列・廃棄作業を行うためには、棚の位置まで自律的に移動し、商品の位置や形状を認識して正確にハンドリングできる機能を備える必要があります。当チームのロボットシステムは、全方向移動台車メカナムローバー(ヴイストン社)および人協働型7軸双腕ロボットYuMiⓇ(ABB社)を組み合わせたモバイルマニピュレータを構成しています。これらの産業用途に用いられる高機能なロボットは、本校が拠点校の1つとして取り組む「高専発!Society5.0型未来技術人材育成事業(Compass 5.0)ロボット分野」における「協働型ロボットシステム実証ラボ」の設備として導入され、社会実装を志向したロボットシステムの高度な統合化開発プロジェクトとして活用したものです。
コア技術について
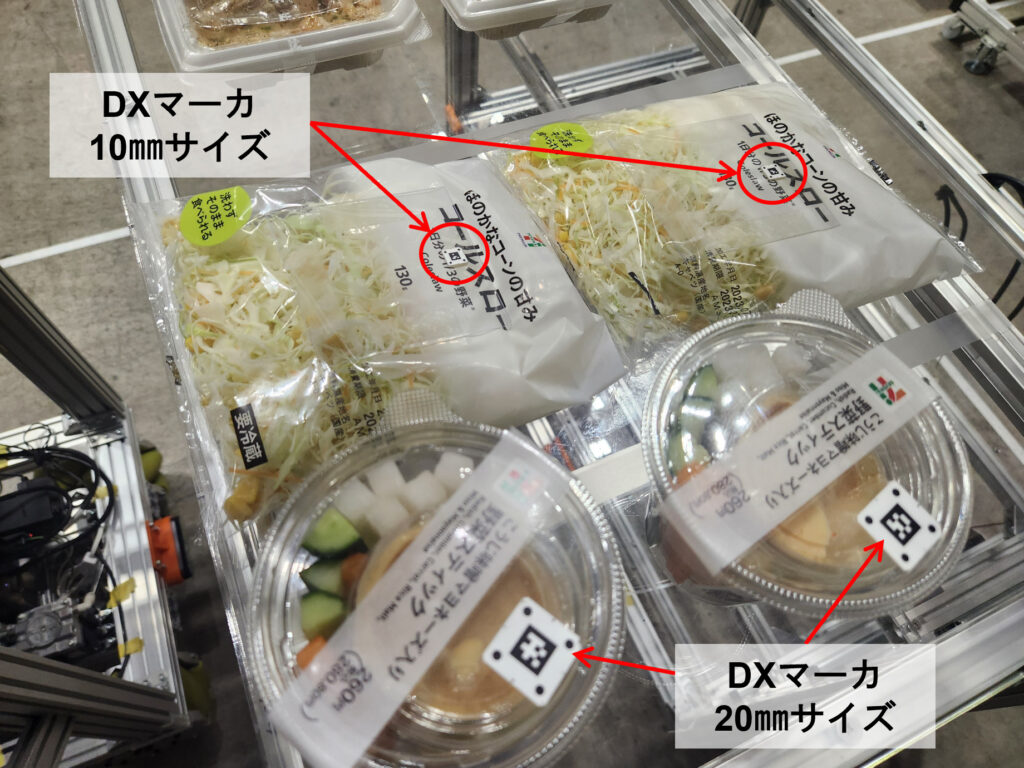
当チームはロボットの自律移動および商品ハンドリングのために、特殊印刷の小型ビジュアルマーカを採用し、汎用のUSBカメラを用いた高精度な画像認識システム実装しています。コンビニ店舗内の設備には80㎜角、40㎜角のENマーカを、商品にはさらに小型の20㎜角および10㎜角のDXマーカⓇを設置することで、高精度な自律移動ナビゲーションおよび商品の正確な位置姿勢認識を実現しました。本技術開発にあたり、産総研の技術を用いたベンチャーのリーグソリューションズ株式会社様ならびに大日本印刷株式会社(DNP)様のご協力を賜りました。

(*1) Future Convenience Store Contest
ロボット技術によって従業員の負担を軽減し、お客様に新しいサービスを提供する未来のコンビニエンスストアを実現することを目的としたロボット競技会です。対象となる競技は、陳列・廃棄タスク、接客タスク、およびトイレ清掃タスクの3つのタスクが設定されており、1つ以上のタスクに参加可能です。